Flugsteuerung
Manche Flugsteuerungen besitzen zusätzliche Sensoren wie Magnetometer (elektronischer Kompass), Barometer zur Höhenmessung oder unterstützen GPS-Module für Navigationsfunktionen. Für typisches FPV-Fliegen genügt jedoch die grundlegende IMU — Gyro und Beschleunigungssensor.
Die Firmware ist die Software auf dem Mikroprozessor der Steuerung und bestimmt das Flugverhalten. Sie verarbeitet Sensordaten, kommuniziert mit Empfänger, ESCs und Videosystem und definiert die Reaktion auf die Steuerbefehle. Im FPV-Bereich sind die wichtigsten Firmwares Betaflight, INAV und ArduPilot. Betaflight läuft in der Regel auf nahezu jeder FPV-Steuerung. ArduPilot und INAV unterstützen nur bestimmte Mikrocontroller-Familien.
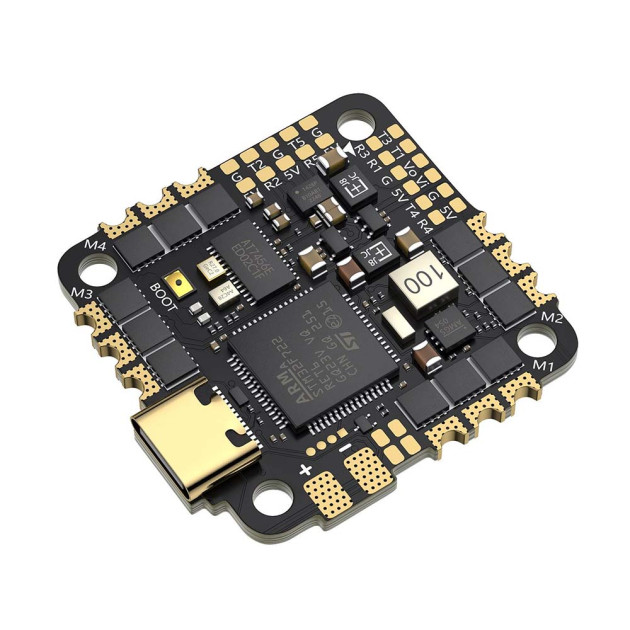
Der Mikroprozessor bestimmt Rechenleistung, Schnittstellenvielfalt und Latenz. Weit verbreitet sind STM32-Controller (STMicroelectronics), optimiert für Regelung in Echtzeit und umfassend unterstützt von Betaflight, INAV und ArduPilot. Einsteiger- bzw. AIO-Boards setzen oft auf STM32F411 (überschaubare Leistung, meist 2 UARTs). Sehr verbreitet ist der STM32F405 — ausreichend für die meisten FPV-Anwendungen; Plus: breite Kompatibilität inkl. ArduPilot, Minus: weniger Leistungsreserve. STM32F722 bietet höhere Taktung und mehr Hardware-Interfaces; wegen kleinerer Speicher wird der F722 von ArduPilot nicht unterstützt. STM32H743 ist High-End bis 480 MHz — ideal für anspruchsvolle Aufgaben, GPS-Navigation und Telemetrie; Boards haben oft zwei IMUs. H743 wird von allen großen Firmwares unterstützt. STM32G4 ist eine jüngere Generation, auf Motorsteuerung optimiert, häufig auf AIO-Boards mit integrierten ESCs. AT32 (Artery Technology) ist eine alternative MCU-Serie, die auf günstigen Boards mit gutem Preis-/Leistungsverhältnis auftaucht.
Die IMU ist das Kernelement jeder Steuerung. Das Gyro misst die Winkelgeschwindigkeit, der Beschleunigungssensor die lineare Beschleunigung. Die Firmware nutzt diese Daten zur Flugstabilisierung. Qualität und Typ des IMU-Sensors beeinflussen Steuergefühl, Vibrationsunempfindlichkeit und die Gesamtstabilität. Häufig genutzte Sensoren sind MPU6000, ICM42688 und BMI270. Der MPU6000 gilt seit Langem als besonders robust mit sehr guter Rausch-/Vibrationsfestigkeit — ideal für Freestyle und Racing; Nachteile: Preis und Verfügbarkeit. Der ICM42688 ist moderner mit höherer Genauigkeit und schnellerer Reaktion, benötigt aber aufgrund höherer Störempfindlichkeit gute Filter und eine saubere Build-Qualität; aktuell der am häufigsten verwendete IMU-Chip im FPV-Bereich. BMI270 (Bosch) hat eine geringere maximale Abtastrate, wodurch die Reaktionsfreudigkeit sinken kann — eher für ruhigere Flugstile.
Weitere Komponenten werden über UART, I2C und CAN angeschlossen. UART ist im FPV-Bereich Standard — für Empfänger, VTX, GPS, Telemetrie oder den Blackbox. I2C ist eine Bus-Schnittstelle für Sensoren mit geringer Datenrate (z. B. Magnetometer, Barometer). CAN ist eine moderne, störfeste Schnittstelle für fortgeschrittene Systeme — etwa digitale ESCs, GPS-Module, Sensoren oder Telemetrie in Builds mit ArduPilot oder INAV. CAN bieten Boards mit H7-Prozessor.
Eine nützliche Funktion ist der Blackbox — interner oder externer Speicher, der Flugdaten mitschreibt. Diese Logs nutzt man zum PID-Tuning, zur Filter-Optimierung und für die Fehlersuche. Einige FCs besitzen Speicher an Bord, andere loggen auf eine SD-Karte; bei günstigen Modellen fehlt die Funktion.
Achten Sie bei der Auswahl auch auf die Verdrahtung/Anschlüsse. Moderne Boards besitzen oft Steckverbinder für ESC-Kabelbäume, digitale und analoge Video-Signale, LEDs u. a., was Aufbau und Service vereinfacht. Die Pin-Belegung dieser Stecker variiert je nach Hersteller — also unbedingt prüfen.
Häufig werden Flugsteuerungen mit weiteren Komponenten kombiniert, um Gewicht zu sparen und den Aufbau zu vereinfachen. Manche Boards integrieren einen ELRS-Empfänger, Bluetooth/Wi-Fi für die drahtlose Konfiguration, einen Powerswitch oder Kameraschalter. AIO-Boards vereinen FC und ESCs; kleine Whoop-AIOs bringen oft sogar den VTX mit — anschließen muss man nur noch die Kamera.
Die Boardgröße richtet sich nach dem Montage-Lochraster und sollte zum Rahmen passen. Das größte Raster 30,5×30,5 mm nutzt man bei klassischen 5″- und größeren Quads mit Platz für einen Stack aus separaten Komponenten (FC, ESC, VTX). Das mittlere Raster 20×20 mm ist typisch für 3–4″ und Racing-Builds. AIO-Boards mit 25,5×25,5 mm sind üblich bei Tinywhoops, Toothpicks und kleineren 2–3″ Quads. Prüfen Sie, ob der Rahmen das Raster und die Steckerfreiheit unterstützt.

Firmware
Die Firmware ist die Software der Flugsteuerung. Sie verarbeitet Ihre Empfänger-Eingaben mit Regelalgorithmen und gibt entsprechende Drehzahlbefehle an die ESCs aus. Am häufigsten für Racing-Copters ist Betaflight. Für Flüge mit GPS-Stabilisierung eignet sich INAV. Für Missionsflüge, erweiterte Stabilisierung und PC-gestützte Steuerung ArduPilot.Betaflight

Betaflight ist eine Open-Source-Firmware für FPV-Racing-, Freestyle- und Micro-Drohnen. Ziel ist die maximal schnelle Reaktion zwischen Stickbewegung und Motorantwort. Durch optimierten Code und hohe Regelraten (bis 8 kHz) ermöglicht Betaflight extrem präzises, sanftes Steuern selbst bei hohen Drehzahlen.
Betaflight nutzt PID-Regelung, die sich fein abstimmen lässt. Integrierte digitale Filter dämpfen Sensorrauschen und Vibrationen, was Stabilität und Effizienz erhöht. Unterstützt wird bidirectional DShot — die bidirektionale Kommunikation FC↔ESC misst Motordrehzahlen in Echtzeit und optimiert Filter automatisch.
Geflogen wird Betaflight meist im manuellen (Acro) Modus, in dem Sie die Winkelgeschwindigkeit steuern, oder im Angle-Modus, in dem Sie den Neigungswinkel vorgeben. Der Throttle wird stets manuell bedient. Mit GPS kann Betaflight Return-to-Home (RTH) ausführen — nützlich insbesondere für Long-Range.
Praktisch eignet sich Betaflight für alle manuell gesteuerten FPV-Quads (vom Tinywhoop bis zum 10″ Long-Range), bei denen Reaktionsgeschwindigkeit, Präzision und Stabilität entscheidend sind. Für vollautonome Waypoint-Missionen sind INAV oder ArduPilot die bessere Wahl.
Die Konfiguration erfolgt mit der Desktop-App Betaflight Configurator, der eine eigene Kapitel gewidmet ist.
INAV
INAV hat gemeinsame Wurzeln mit Betaflight und ähnelt ihm in manchem. INAV konzentriert sich auf Stabilität, präzise Navigation und Autonomie. Es arbeitet mit GPS, Magnetometer, Barometer u. a. und ermöglicht Altitude Hold, Position Hold und Return to Home (RTH).
INAV verwendet die klassische PID-Regelung, ergänzt um Navigationsschleifen, die GPS- und IMU-Daten auswerten. Es hält Kurs, stabilisiert bei Wind und reagiert präzise auf Richtungsänderungen. Es unterstützt autonome Waypoint-Missionen und Auto-Landung. Konfiguration über den INAV Configurator mit detaillierten Einstellungen für Sensoren, Filter, Mixer und Flugmodi.
Im Unterschied zu Betaflight ist INAV deutlich universeller und wird nicht nur auf Multirotoren, sondern auch auf Flächenmodellen, Seglern und VTOL eingesetzt. Besonders beliebt bei Long-Range-Piloten und FPV-Flächenfliegern.
ArduPilot
ArduPilot ist die fortschrittlichste Open-Source-Flugsoftware für Multicopter, Flächenflugzeuge, Bodenroboter und Boote. Im Unterschied zu Betaflight (fokussiert auf Acro) und INAV (grundlegende Navigation) bietet ArduPilot ein vollwertiges Autopilotsystem mit breiter Sensorunterstützung, präziser Navigation und leistungsfähiger Automatisierung. Es ermöglicht vollautonome Missionen, Echtzeitsteuerung über eine Bodenstation (GCS) und detailliertes Management von Flugmodi und Sicherheitsfunktionen. Der Preis dafür ist die höhere Komplexität — ArduPilot empfiehlt sich vor allem für erfahrene Builder. Ein Onboard-Computer (z. B. Raspberry Pi) lässt sich einfach integrieren.
Unterstützt werden ausgewählte FPV-Steuerungen mit F4- und H7-Mikrocontrollern. ArduPilot läuft zudem häufig auf professionellen FCs. Es kann praktisch alles steuern und bietet zahlreiche Modi — von manuell (Acro, Stabilize) über halbautonom (AltHold, Loiter, PositionHold) bis vollautonom (Auto mit Waypoints, Guided, RTL, AutoTune). Alle Modi sind detailliert konfigurierbar. ArduPilot unterstützt fortgeschrittene Sensorik wie GNSS/GPS mit Mehrband-Empfang, präzise Barometer, Kompass usw., angeschlossen via UART, I2C oder CAN.
Die Failsafe-Logik von ArduPilot gehört zu den umfassendsten. Reaktionen bei RC-Signalverlust, niedriger Spannung, GPS-Ausfall oder beim Verlassen einer Zone (Geofence) lassen sich definieren: Auto-Landung, RTL, Mode-Wechsel oder Aktionen. ArduPilot zeichnet Flugdaten detailliert im internen Speicher oder auf SD-Karte auf — ideal für Vibrationsanalyse, Motorsteuerung, Energie und Fehlersuche.
ArduPilot bietet dynamische und harmonische Filter zur Dämpfung großer Prop-Vibrationen. Einsetzbar von kleinen 2″-Quads bis zu 30″ und größer — überall dort, wo Stabilität und Sanftheit wichtiger sind als extreme Agilität. Das Tuning beschleunigt AutoTune, das PID automatisch anpasst.
Die Konfiguration erfolgt mit Mission Planner (Windows) oder QGroundControl (Windows/macOS/Linux/Android). Diese Apps ermöglichen komplettes Setup, Kalibrierung, Updates und Missionsplanung und dienen häufig während des Flugs zur Telemetrie/Steuerung.
ArduPilot ist ideal für Piloten, die zuverlässige Navigation, lange Flüge, reproduzierbare Missionen und maximale Sicherheit benötigen. Geeignet für Long-Range-Plattformen (7–10″, Li-ion/LiPo), große industrielle Drohnen und Flächenflugzeuge. Für reines Freestyle/Racing, wo unmittelbare Reaktion und Einfachheit zählen, bleibt Betaflight die bessere Wahl; INAV bildet den Mittelweg.