ESCs
Der ESC (Electronic Speed Controller) steuert die Drehzahl jedes Motors anhand der Befehle der Flugsteuerung (FC). Jeder Motor besitzt seinen eigenen ESC, der FC-Signale in präzise Impulse für den bürstenlosen Motor umsetzt. In FPV-Drohnen werden drei Bauformen genutzt: 4-in-1-ESCs, AIO-Boards mit integrierten ESCs und Einzel-ESCs. Bei der Wahl zählen der Maximalstrom (muss über dem Motor-Peak liegen) und die Spannungsfreigabe (muss zur Batterie passen). Unterdimensionierte ESCs können überhitzen oder durchbrennen. Wichtig sind außerdem Montageraster und Steckkompatibilität zum FC.
Übliche Richtwerte:
- 5–12 A — TinyWhoops, 0703–0802 Motoren (1–2S)
- 12–20 A — 2–3″ Quads, 1104–1108 Motoren (2–4S)
- 20–40 A — 3–4″ Quads, 1404–2204 Motoren (3–6S)
- 40–60 A — 5–7″ Quads, 2206–2408 Motoren (4–8S)
- 80 A+ — Cinelifter und 10–15″ Long-Range-Plattformen (6–8S)
4-in-1-ESCs
Am verbreitetsten sind 4-in-1-ESCs — vier Regler auf einem Board. Standard-Montageraster: 30,5×30,5 mm (für 5–10″) und 20×20 mm (für 2–5″). Sie werden im Stack mit der FC verbaut und über Kabelbaum oder Board-Connector verbunden. Das spart Platz, Gewicht und vereinfacht die Verdrahtung. Die angegebene Stromstärke gilt pro Kanal.
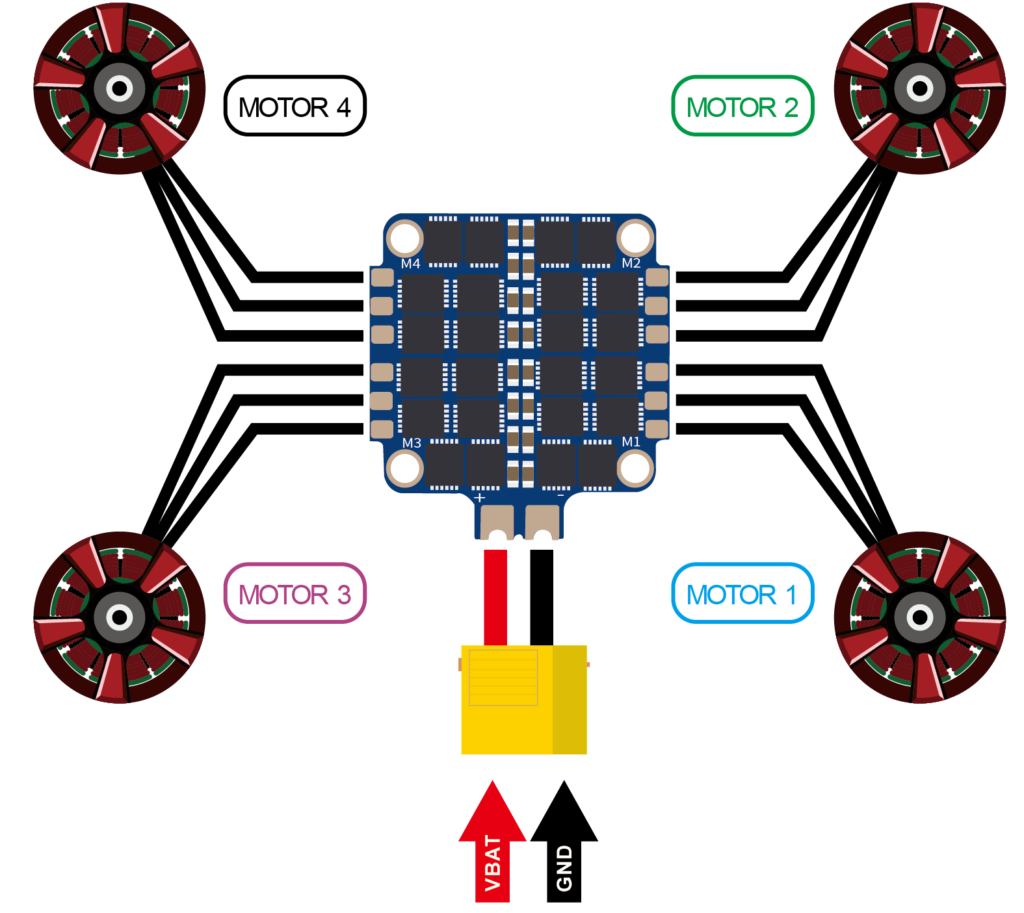
Beim Stack unbedingt den Pinout des Verbindungssteckers prüfen — er variiert je nach Hersteller. Moderne 4-in-1s besitzen häufig einen Stromsensor und teils Telemetrie (Spannung, Strom, Temperatur) zur FC.
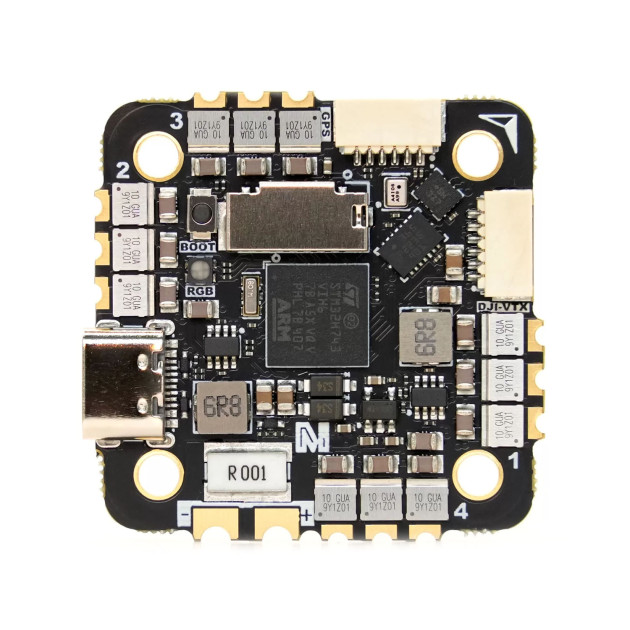
AIO-Boards
AIO (All-in-One) vereint Flugsteuerung und ESCs auf einem PCB. Typisch für TinyWhoops, Toothpicks und andere leichte Micro-Quads, wo Raum/Gewicht kritisch sind. Übliche Raster: 25,5×25,5 mm oder 26×26 mm, mit Stromstärken um 5–45 A. Nachteil: Bei ESC-Defekt muss meist das ganze Board getauscht werden. Für kräftige 5″+-Builds sind AIOs weniger geeignet.
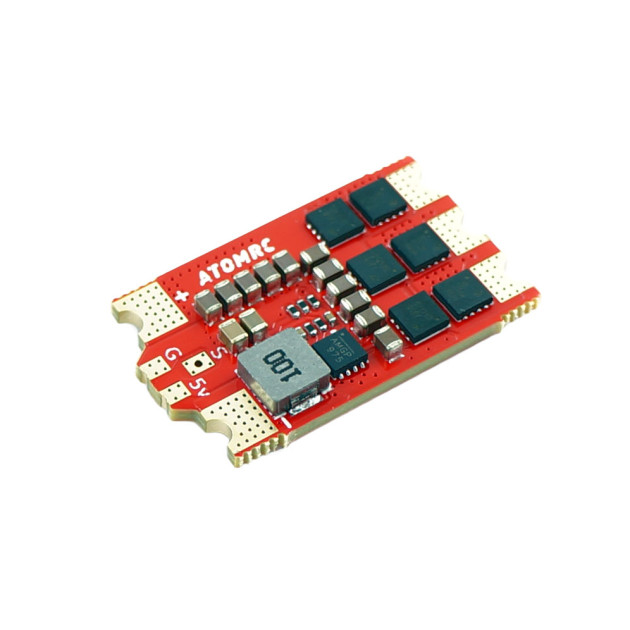
Einzel-ESCs
Single-ESCs nutzt man vor allem bei Flächenmodellen (ein Motor) und großen Quads (15″+), wo die Ströme ein 4-in-1 überfordern. Vier starke Regler auf einem Board wären dort kaum zu kühlen. Manche ESCs integrieren einen BEC (5/6 V), z. B. zum Versorgen von Empfänger und Servos bei Flugzeugen ohne FC.
Vorteil: einfacher Tausch bei Defekt; Nachteile: höheres Gewicht und aufwendigere Verkabelung.

Weitere ESC-Bausteine
Viele ESCs besitzen einen Stromsensor und senden Telemetrie an die FC. Häufig wird ein externer Elektrolyt-Kondensator an den ESC/Batteriekabeln angeschlossen, um Spannungsspitzen bei schnellen Drehzahlwechseln zu dämpfen — das erhöht die Lebensdauer des ESC und der Elektronik deutlich.

Häufig ist auch eine TVS-Diode integriert, die bei hartem Bremsen vor Überspannung schützt. Kondensator und Schutzdioden sind besonders bei 6S und 8S Builds wichtig, da die Transienten hoch sind.
ESC-Protokolle
Das ESC-Protokoll definiert, wie die FC mit dem ESC kommuniziert und wie schnell Befehle in Motordrehzahl umgesetzt werden. Die Entwicklung reichte von langsamen Analogsignalen bis zu heutigen Digitalprotokollen.
Ältester Antrieb ist klassisches PWM (Pulsbreite = Gas). Langsam und kalibrierpflichtig; heute vor allem bei Flächenmodellen ohne FC (Empfänger steuert ESC direkt). Später kamen OneShot125, OneShot42 und MultiShot — analog, aber deutlich schneller; in FPV-Quads inzwischen selten.
Der heutige Standard ist DShot (Digital Shot), ein digitales FC→ESC-Protokoll. Statt Pulsbreite sendet DShot einen digitalen Rahmen mit Befehl und CRC — präziser, schneller und störfest.
Geschwindigkeiten: DShot150, DShot300, DShot600, DShot1200 (kbit/s). Moderne ESCs unterstützen bidirectional DShot, bei dem der ESC Motordrehzahl (RPM) und Spannung an die FC zurückmeldet. Das ermöglicht den RPM-Filter im Gyro-Signalweg — deutlich bessere Flugstabilität und Vibrationsunterdrückung.
DShot bringt weitere Vorteile: keine Gasweg-Kalibrierung, Richtungswechsel des Motors per Software, Motor-Beeping zum Auffinden des Copters und ESC-Diagnose. Daher ist DShot heute der de-facto-Standard in FPV.
Für Spezialfälle existieren Varianten wie ProShot (Hybrid aus DShot/PWM) oder FDShot (Fast Digital Shot) mit noch geringerer Latenz, aber geringer Verbreitung. Für die meisten Builds sind DShot300 oder DShot600 die praxisgerechten Optionen.
Firmware
Jeder ESC benötigt Firmware, die die Motorregelung und Protokolle (DShot, OneShot etc.) definiert. Gängig sind BLHeli_S, BLHeli_32, Bluejay und AM32. Firmware lässt sich per PC updaten und konfigurieren — über die FC (Betaflight, INAV, ArduPilot) oder via USB-Adapter bei Einzel-ESCs am Flächenmodell. Eine eigene Kapitel behandelt die ESC-Konfiguration.
BLHeli_S
BLHeli_S ist eine weit verbreitete Open-Source-Firmware für FPV. Sie läuft auf 8-Bit-MCUs, gilt als stabil und zuverlässig, bietet sanften Motorlauf, einfache Einrichtung und unterstützt DShot150–DShot600. Einschränkung: kein natives bidirectional DShot.
BLHeli_32
BLHeli_32 richtet sich an 32-Bit-ARM-MCUs, bietet feineres Regelverhalten, ESC-Telemetrie (Spannung, Strom, Temperatur), bidirectional DShot (RPM) und detailliertes Tuning. Kommerziell (nicht Open Source), aber lange der Standard für leistungsstarke Quads. Im Frühjahr 2024 wurde die Entwicklung aus geopolitischen Gründen eingestellt. Manche ESCs werden noch mit BLHeli_32 ausgeliefert, das jedoch nicht mehr aktualisiert werden kann. Gelegentliche Pre-Release-Builds existieren (Konfiguration via BLHeliSuite32 Test). Trotz Freeze bleibt BLHeli_32 stabil nutzbar; moderne Open-Source-Alternativen wie AM32 übernehmen die Weiterentwicklung.
Bluejay
Bluejay ist Open-Source für 8-Bit-Hardware und ergänzt moderne Features wie bidirectional DShot, einstellbare PWM-Frequenz und Starttöne. Lässt sich einfach auf BLHeli_S-Hardware flashen (inkl. Web-Flasher) und wird dank RPM-Support immer beliebter.
AM32

AM32 ist eine Open-Source, 32-Bit-Firmware als freie Alternative zu BLHeli_32. Ähnliche Features (Telemetrie, bidirectional DShot, präzise Regelung) ohne Lizenzrestriktionen, breite MCU-Unterstützung und gute Anpassbarkeit.